HOME
�@�A�N�Z�X
�@�������̏Љ�
�d�q�H��̕���
�@CAD�̕���
�@�_�E�����[�h�y�[�W��
��د��LED
�@ESP8266(���u����)
�@�ٶװLED
Arduino_IDE
��د��LED�̓_������
�@��Ă̑g���ĕ�
�@���3��ϲ�݂Ŋ��
�@�\�t�g
����د��LED�̓_��������
��ʓI����ظ�LED��8�~8(���})��16�~16�ł���
����ʼn������ƕ��G�Ō��ɂ���������
�������ȑf�����邽�߂�
3�~3����ظ�LED���`���ĉ�����܂��B
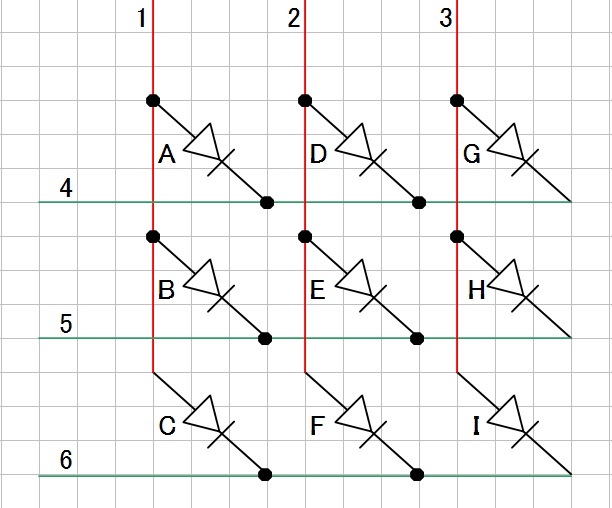
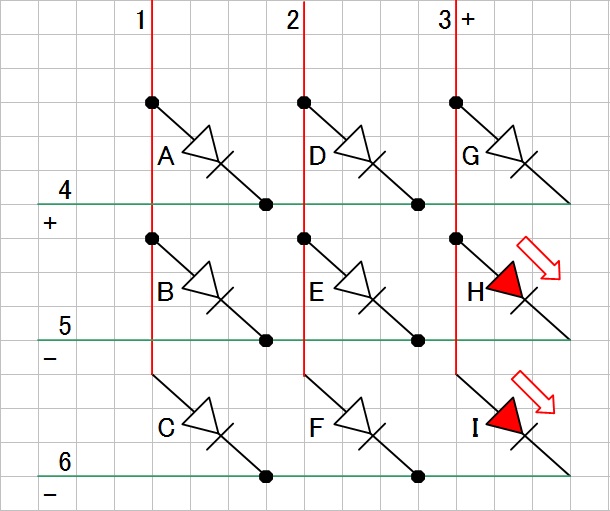
�����̉���Ɏg�p����}�g���b�N�XLED��
���}�̂悤��9��LED(A�`I)���z�u���ꂽ
3�~3�}�g���b�N�XLED�Ƃ���
�z����6�{�����o���ꂽ���̂ł��B
�A�m�[�h����1�A2�A3�s���̔z��(
�Ԑ�
)��
�J�\�[�h����4�A5�A6�s���̔z��(
��
)��
�����o����Ă���\���Ƃ��ĉ�����܂��B
����̉���O�Ɋ�{�I�Șb�ł���
�d���͓d���̍�������{����|������
(�d�ʂ̍���������Ⴂ���ցj����܂��B
�܂�LED�̓_�C�I�[�h�ł��̂�
�A�m�[�h(�Ԑ�)������J�\�[�h(��)�����ւ�
�d���𗬂��܂����t�����ɂ͓d���𗬂��܂���B
(1�A2�A3����4�A5�A6���ւ͓d���𗬂����Ƃ��ł��܂���
4�A5�A6������1�A2�A3�ւ͓d���͂Ȃ����܂���B)
�@�܂�1�s�����{�Ƃ��܂��B�A
2�s����3�s���́|(0V)����Hi-Z(�J�����)�Ƃ�
4�s����5�s���́|�A6�s���́{�i����Hi-Z�j�Ƃ����
�`�A�a�͓_���A�b�͏����ƂȂ�܂��B
�e�A�h�͋t�����̂��ߓd���͗���܂���B
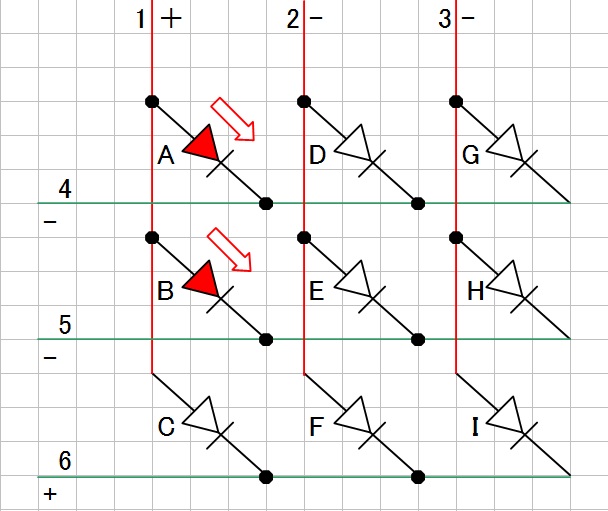
�`�̓A�m�[�h��1�s���A�J�\�[�h��4�s����
�Ȃ����Ă��܂��B�{����|�����֓d��������
�`���_�����܂��B
�b�̓A�m�[�h��1�s���A�J�\�[�h��6�s����
�Ȃ����Ă��܂��B�d���̍����Ȃ�����
�d���͂Ȃ���܂���B
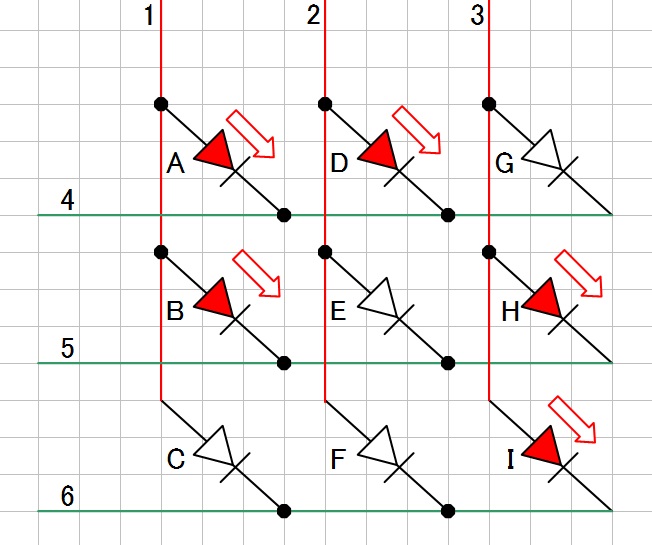
�A����2�s�����{�Ƃ���
4�s�����|�A5�s����6�s�����{�Ƃ����
�c�͓_���A�d�A�e�͏����ƂȂ�܂��B
���̂k�d�c�͏����ł�
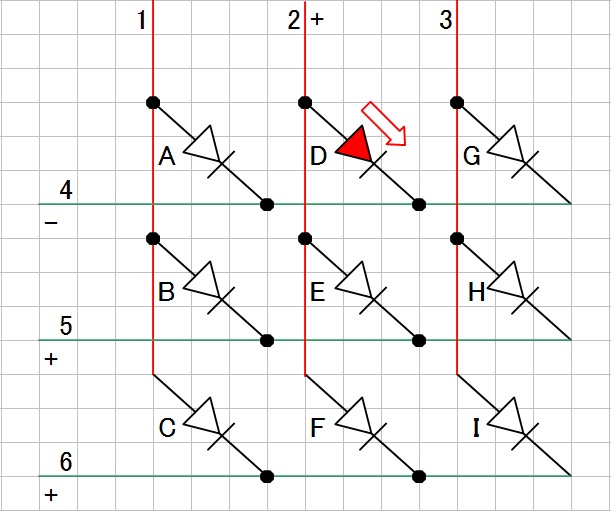
�B�����3�s�����{�Ƃ���4�s�����{�A5�s����6�s�����|�Ƃ����
�f�͏����A�g�A�h�͓_���ƂȂ�܂��B
���̂k�d�c�͏����ł�
���̇@����B�̓��������₭�J��Ԃ���
(�Ⴆ�·@10ms�ˇA10ms�ˇB10ms�ˇ@10ms�E�E�ŌJ��Ԃ���)
�l�Ԃ̖ڂɂ͉��̂悤�ɓ_�����Ă���悤�Ɍ����܂���
���ۂɂ͊eLED��1/3�ȉ��̎��Ԃœ_�����Ă���_�ŏ�Ԃł��B
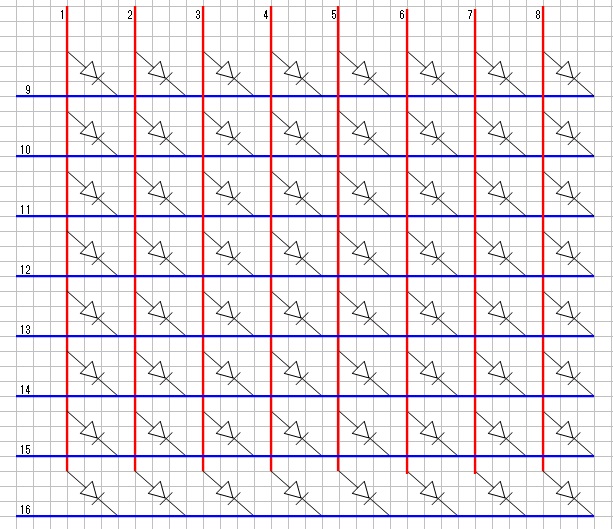
���Ď��ۂɎg�p����8�~8��ظ�LED��
���̂悤�ȍ\���ƂȂ�̂Œ[�q��16�_�L��
�z����16�{�K�v�ƂȂ�܂�
(�A�m�[�h��8�{�A�J�m�[�h��8�{)
�}�����ɂ����Ȃ�̂łR�~�R�̃}�g���b�N�X��
������܂����������͓����ł��B
LED�̗�3��8��ɂȂ�̂�
3�T�C�N��(�@�`�B)��
8�T�C�N��(�@�`�G)�ɂ����܂��B
8�~8��ظ�LED���}�C�R����
���ڐ��䂷��ɂ�
����16�{���}�C�R���Ɛڑ����܂��B��1
���������Ċe���LED��1/8�ȉ��̎��Ԃœ_��������
�_�ŏ�Ԃł̐���ƂȂ�܂��B
��1�@���Ӂ@�}�C�R�����A�d���ő��i�̍l�����K�v�ł��B
LED�̒[�q�Ԓ�i�d���͖�2V�ł�
5V�n�A3.3V�n�}�C�R����IO�|�[�g�ƒ��������
�}�C�R���̃|�[�g�o�͓d����
�}�C�R�����̓d���ő��i����̂�
��{�I�Ƀ}�C�R�������܂��B
����������ƑO�q�̃T�C�N����
��ɌJ��Ԃ��Ȃ�����
�e����قȂ�p�^�[���@��2
�œ_�����Ă���悤��
(���ۂɂ͓_�łł����E�E�E)
�����邱�Ƃ��ł��܂���B
��ظ�LED���\����ԂŌp�������邾���ł�
�}�C�R���͌��\�Z�����Ȃ�܂��B
��2�@�S�_��(A�������ׂā{�AK�������ׂā|�ʼn\)
�Ȃǂ͕ʂł�
���ă}�C�R�����̏�������ظ�LED��
�_�������邾���Ȃ�܂��ǂ��̂ł���
���ۂ͑��̏����ɂ����Ԃ��K�v�ł��B
���̏��v���Ԃ̒����ɂ���Ă�
�u�ԓI�ɕ\�����_�ł��Č����铙��
�x�Ⴊ�����邱�Ƃ�����܂��B
�����8�~8��ظ�LED��3��
���䂵�悤�Ƃ�����
�ǂ��Ȃ�ł��傤�H
������������ł��ˁE�E
48�{�̔z�����K�v�ƂȂ�܂��B
���Z��16�{���p���Őڑ���
3�{(�d�m)�Ƃ����
�z���͌��点�܂���
�T�C�N����8�T�C�N������24�T�C�N��
�Ƃ���K�v������̂�
�_�����Ԃ�1/24�ɂȂ��Ă��܂�
�ő�P�x�͉�����܂��B
(�ڍא����͏Ȃ��܂�)
�܂��}�C�R����3�p�ӂ����
�ǂ��̂�������܂���E�E�E
�����~����̂悤�ɓo�ꂷ��̂�
LED�h���C�o(LED�h���C�oIC)�ł��B
LED�h���C�o�ɂ̓����������ڂ���Ă���
�}�C�R����LED�h���C�o�ɂЂƂ���
�_���p�^�[���̏��𑗂��Ă���
LED�h���C�o�͓�����������
���̏����L�����A�}�C�R���̑����
LED�h���C�o���J��Ԃ�
�}�g���b�N�XLED��\�������鐧���
�s���Ă���̂ł��B
���������ă}�C�R���́A
���ɓ_���p�^�[����ύX�����鎞�܂ŁA
���̍�Ƃɐ�O���邱�Ƃ��ł��܂��B
LED�h���C�o�͊ȒP�ȏ����ɓ�������
�}�C�R���ƍl���Ă��ǂ��ł��傤�B
�����ĂQ��ނ̃}�C�R���ō�ƕ��S���Ă���
�ƍl���Ă��ǂ��ł��傤�B
�}�C�R����LED�h���C�oIC��I/F�ł���
SPI������I2C������������
�����ɂ��z���̖{��������܂��B
�܂�S/W������܂��B
�����ŏЉ��L�b�g�Ɏg�p���Ă���
MAX7219��SPI������LED�h���C�oIC�ł��B
�̂��炠��3������SPI�����ł��B
�V���p���ϊ���74XX595�̂Ɠ����v�̂ł��B
TC74HC595�̃f�[�^�V�[�g�����Ă���������
�Q�l�ɂȂ�Ǝv���܂��B
3�{�̔z�����K�v�ł��B
I2C������2����SPI�Ƃ��Ă�
�}�C�R���Ƃ̊Ԃ̐ڑ���2�{�ɂȂ�
�}�C�R�����̃|�[�g��ߖ�ł��܂��B
�����z����o�����Ŏg�p���邽��
�o�͕��̓I�[�v���h���C��
�i�I�[�v���R���N�^�j
�ƂȂ��Ă��邽�߃v���A�b�v��R���K�{�ł���
��R�l�ɂ��ʐM�ő僌�[�g���ς���Ă��܂��B
�I�[�v���h���C����
OFF��ON�̕ω���
���₭�s���܂���
ON��OFF�̕ω��͊ɖ��ł��B
���̑����̓v���A�b�v��R��
�����d���Ɉˑ����邩��ł��B
��R�l��Ⴍ�����
�d������������
ON��OFF�̕ω��������Ȃ�܂���
�ڑ�����Ă���IC�̓d���l��
��ő��i���Ȃ��悤��
��R�l���߂�悤�ɂ��܂��B
��������R�̒�i�d�͂��l�����K�v�ł��B
�܂��}�C�R���ƃh���C�oIC�̋쓮�d�����قȂ�
�ꍇ�ɂ͉�H�ɍH�v���K�v�ƂȂ�܂��B
����I2C�̊T�O�Ƃ��ă}�C�R�����}�X�^�[�ƂȂ�
�Z���TIC��h���C�oIC���X���[�u�ƂȂ�
�����̃f�o�C�X��2�{�̐���ڑ����܂�
�X���[�u���̓A�h���X���ݒ肳��
���̃A�h���X�ŁA�ǂ̃f�o�C�X�ւ̎w���Ȃ̂�
�F�����܂��B�i�ڍא����͏Ȃ��܂��j
�o�ܥ�T�������̊�{
�@��Ă̑g���ĕ�
�@���3��ϲ�݂Ŋ��
�@�\�t�g
CAD�̕���
�@�_�E�����[�h�y�[�W��
�����̕���
�@�V���~���[�V�����̕���
�@�k�ۂ��̂Â��茤����TOP


(�ŏI�X�V 2017-10-15)